CADRE: Eixams Robòtics i Cervells Digitals per a la Conquesta de la Lluna.
L’exploració del nostre sistema solar s’ha enfrontat històricament a un coll d’ampolla operatiu: els retards de comunicació i la dependència d’un comandament centralitzat. Durant dècades, utilitzar un vehicle explorador a Mart, o en entorns lunars complexos, ha implicat un procés lent. Un rover captava una imatge, la transmetia a la Terra i havia d’esperar que els enginyers analitzessin les dades per enviar-li la instrucció següent. Aquest freqüent “trucar a casa” consumeix un temps preciós i limita la nostra capacitat per explorar zones complexes.
Per superar aquesta barrera, l’exploració espacial busca augmentar l’autonomia de les missions. Aquí és on entra en joc el projecte CADRE (Cooperative Autonomous Distributed Robotic Exploration) de la NASA, dissenyat per demostrar que múltiples robots poden cooperar i explorar conjuntament de manera autònoma.
D’una banda, trobem la robòtica mòbil miniaturitzada: en lloc d’un únic vehicle pesant, es despleguen petits rovers de la mida d’una maleta de mà. De l’altra, l’element que realment potencia aquest maquinari és el programari d’autonomia multiagent. En dotar aquests robots d’aquesta autonomia, poden comunicar-se entre ells mitjançant una xarxa en malla i prendre decisions operatives de manera cooperativa sense la intervenció constant dels controladors humans a la Terra.
L’era de la robòtica mòbil
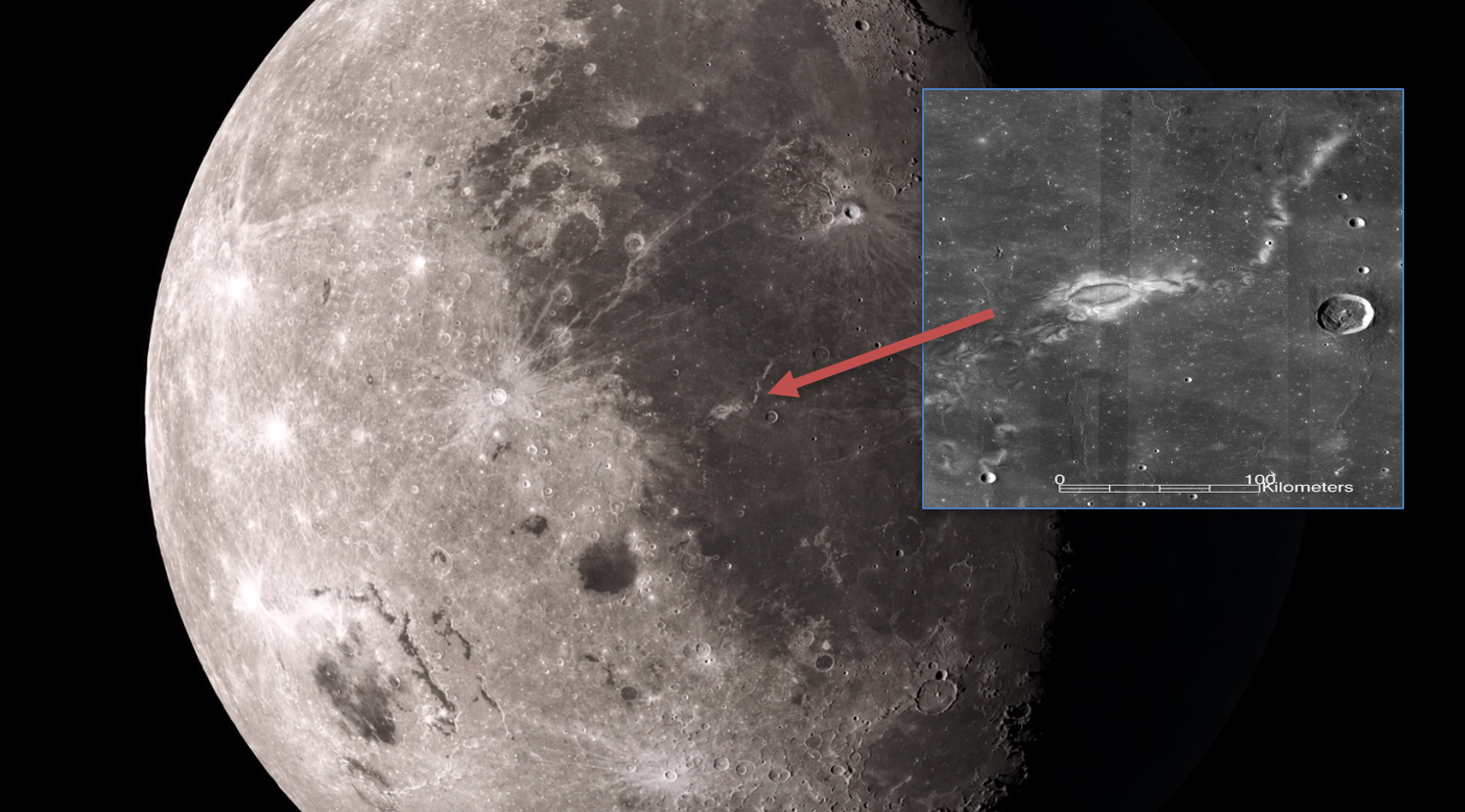
Per il·lustrar el veritable potencial de descentralitzar l’exploració, ens situarem virtualment a la regió lunar de Reiner Gamma, on està previst que CADRE posi a prova el seu equip robòtic. Però abans és fonamental entendre la primera peça d’aquest trencaclosques: la robòtica mòbil miniaturitzada espacial.
Localització de la regió lunar de Reiner Gamma. Composició d’imatges de NASA/Goddard Space Flight Center/Arizona State University.
Amb programari d’autonomia basat en tecnologia prèvia d’A-PUFFER (amb un disseny inspirat en l’origami), aquests mini-rovers estan dissenyats per plegar-se i quedar gairebé plans. Estan equipats amb panells solars, ordinadors de bord i un conjunt de sistemes i instruments que inclouen càmeres estèreo i radars de penetració terrestre o lunar (GPR). Per si sols, aquests robots són màquines avançades capaces de desplaçar-se i capturar imatges estèreo del seu entorn.
Tanmateix, la seva capacitat aïllada té un límit operatiu crític. En models d’operació més centralitzats, si un robot troba un obstacle fora del previst, pot necessitar aturar-se, replantejar la ruta o esperar noves instruccions. A més, un únic robot no pot registrar simultàniament mesures des de múltiples ubicacions separades. És en aquesta limitació individual on la necessitat d’una “ment col·lectiva” esdevé especialment valuosa.
El cervell col·lectiu de la missió: intel·ligència distribuïda
Per superar les limitacions d’un explorador solitari, la solució consisteix a dotar aquestes màquines d’una intel·ligència cooperativa. Aquí entra en escena el programari d’autonomia multiagent. En lloc de limitar-se a executar ordres individuals, aquesta tecnologia permet que un grup de robots funcioni com un equip amb una elevada autonomia.
L’equip mecànic de CADRE ATLO. En aquesta imatge es mostren els components següents del model de vol de CADRE. Fila posterior: (d’esquerra a dreta) càmera de coneixement de la situació, desplegador del rover (un dels tres), estació base. Fila davantera: els tres rovers. Imatge de Ryan Lannom. NASA. JPL (Jet Propulsion Laboratory).
Quan cada vehicle capta dades del seu entorn, utilitza ràdios de xarxa en malla per compartir les seves troballes durant l’operació entre ells i amb una estació base connectada al mòdul d’aterratge. L’estació base compleix el paper de “cervell superior” (high brain), integrant informació col·lectiva, com ara els mapes, per retornar-la als exploradors amb detalls actualitzats.
Aquesta combinació afegeix capacitats operatives avançades. El sistema coordina autònomament les activitats, planificant rutes mentre manté els nivells d’energia i els recursos tèrmics de cada robot dins dels límits establerts. A més, aporta més resiliència mitjançant un mecanisme d’elecció de líder que ajuda a mantenir la continuïtat de la missió si un agent individual falla. En reduir la necessitat de “trucar a casa” per rebre instruccions constants, els exploradors poden realitzar mesures simultànies i distribuïdes des d’ubicacions separades que serien físicament impossibles per a un únic vehicle.
Cartografiant el subsòl lunar amb CADRE
Per demostrar la viabilitat d’aquesta sinergia, la NASA ha dissenyat una demostració a la regió lunar de Reiner Gamma, on arribaran a bord del mòdul d’aterratge de la missió IM-3. Un dels objectius de CADRE és cartografiar el subsòl d’aquesta zona amb un alt grau d’autonomia durant les hores il·luminades d’un dia lunar, l’equivalent a uns 14 dies terrestres.
La missió desplega tres petits rovers i una estació base central. Operant en una formació lineal amb una separació d’un metre, els vehicles recorreran una àrea de 20 per 20 metres, prenent mesures multiestàtiques cada 0,2 metres amb els seus radars de penetració terrestre o lunar. El programari d’autonomia i processament utilitzarà aquestes dades per construir un mapa tridimensional del subsòl sense requerir ordres directes constants des de la Terra.
Abans del seu viatge, el sistema ha estat sotmès a exhaustius processos de validació. Al Jet Propulsion Laboratory (JPL), els models de vol han superat proves en cambres de buit tèrmic per simular les temperatures extremes de la Lluna. Paral·lelament, els equips han emprat simuladors avançats i bancs de prova per avaluar la fiabilitat dels algorismes de percepció, navegació i presa de decisions.
Implicacions àmplies i context general
Si projectes com CADRE tenen èxit, seran només el pròleg. La combinació de robòtica miniaturitzada i programari d’autonomia distribuïda té aplicacions que podrien transcendir aquesta demostració lunar prevista. En el futur, aquesta tecnologia podria expandir-se per explorar terrenys extrems i de difícil accés en altres destinacions, com ara els tubs de lava a la Lluna o Mart i, en conceptes anàlegs, mons oceànics com Europa, la lluna de Júpiter. La capacitat de compartir coneixements i dades de sensors entre múltiples agents podria permetre, per exemple, crear xarxes sísmiques distribuïdes o telescopis d’obertura sintètica.
En el nostre context europeu i espanyol, aquesta tecnologia resulta profundament rellevant. Universitats, centres d’astrobiologia i agències com l’Agència Espacial Europea (ESA) observen, coordinen o desenvolupen conceptes d’autonomia robòtica. La meta futura dels investigadors de CADRE és que aquests sistemes d’autonomia es converteixin en solucions comercials disponibles que puguin integrar-se fàcilment en diferents instruments científics o robots fabricats fora de la NASA.
El gran repte de futur consistirà a escalar aquests sistemes i augmentar-ne la robustesa en missions de llarga durada, obrint la porta a ecosistemes espacials on vehicles i estacions col·laborin com un únic organisme.
L’alba de la intel·ligència col·lectiva espacial
El projecte CADRE busca demostrar de manera eloqüent que el futur d’una part de l’exploració espacial no pertany només al robot solitari, sinó també al treball en equip. La sinergia entre la robòtica mòbil miniaturitzada i el programari d’autonomia multiagent busca reduir el problema històric dels retards i dels cicles de comunicació en les missions espacials.
En dotar aquests petits vehicles d’una “ment col·lectiva”, estem passant de teleoperar eines a distància a desplegar equips robòtics amb una elevada autonomia.
Els beneficis potencials d’aquesta aliança tecnològica són significatius. Pot ampliar la nostra capacitat per realitzar mesures científiques en llocs inaccessibles i augmentar el retorn científic de les missions en reduir el temps que els rovers passen inactius esperant instruccions. A més, el seu disseny distribuït augmenta la resiliència de la missió davant possibles fallades individuals, oferint un model més robust.
Ens trobem davant d’un possible canvi de paradigma fascinant. És rellevant que la indústria, les agències espacials i l’àmbit acadèmic continuïn invertint en el desenvolupament de l’autonomia robòtica col·laborativa. Donar suport i impulsar aquesta “intel·ligència col·lectiva” pot ser una via clau per explorar racons llunyan